

Stranica 37 [37]
{kind=link}
OCR
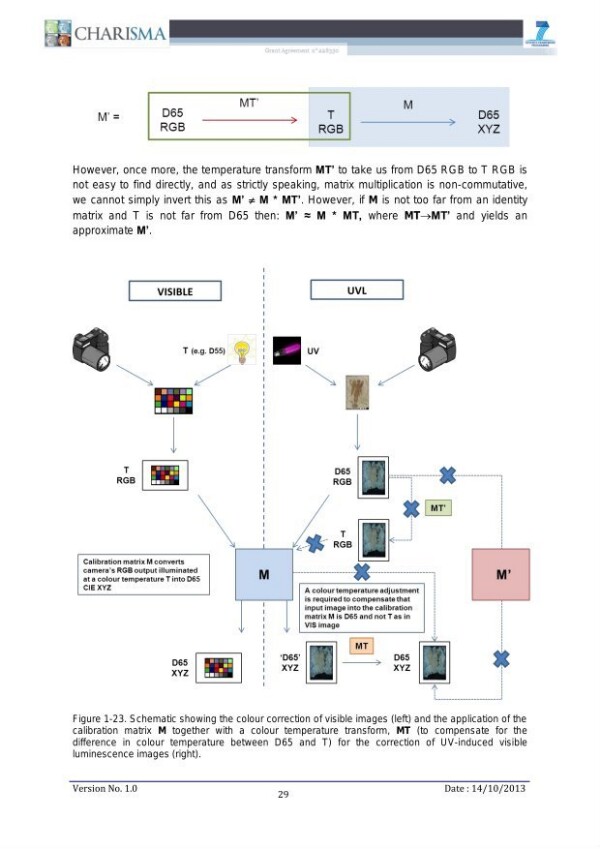
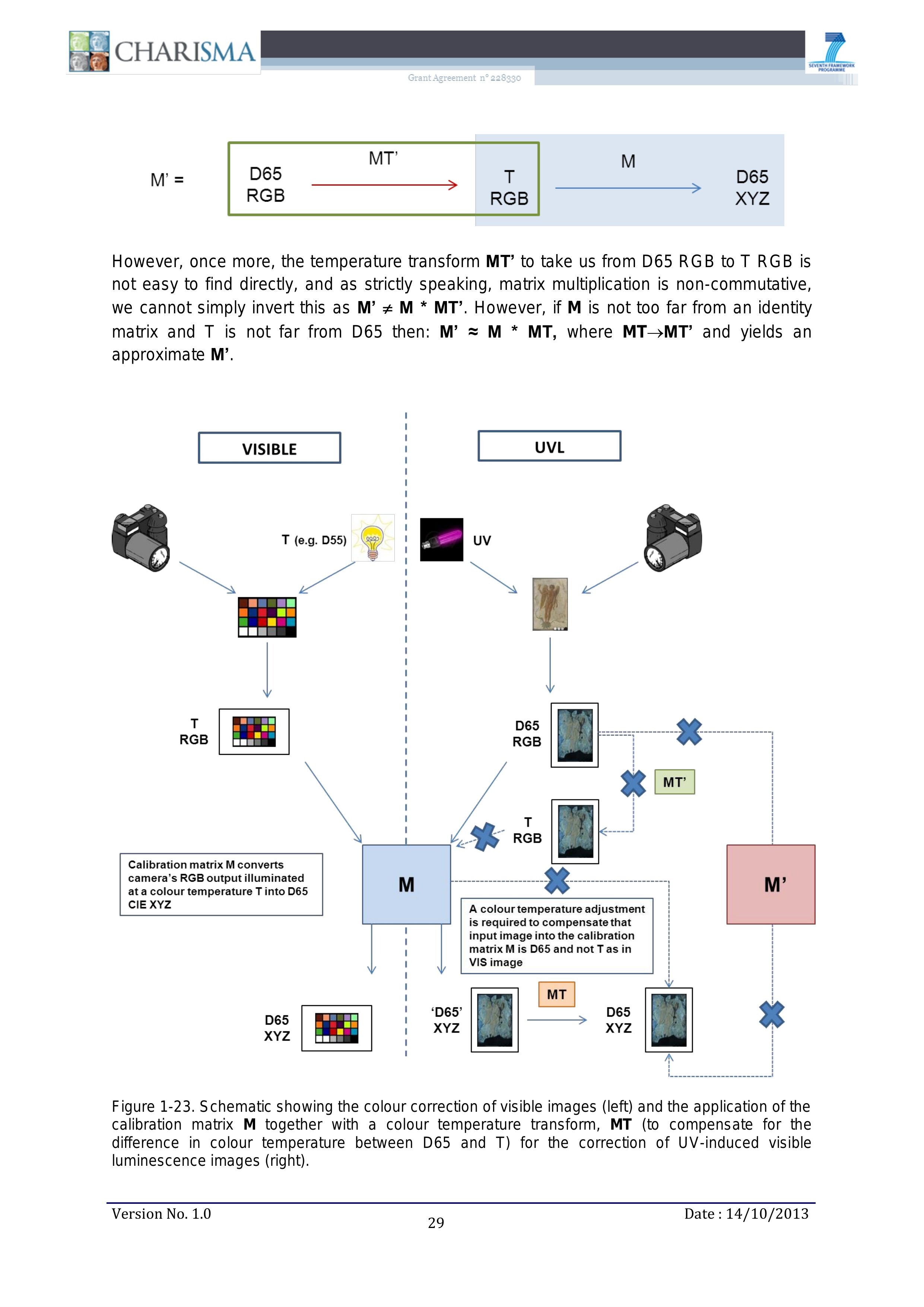
SEVENT FRAMEWORK PROGRAMME CHARIS A HI 7 MT’ M M = D65 s T D65 RGB RGB XYZ However, once more, the temperature transform MT’ to take us from D65 RGB to T RGB is not easy to find directly, and as strictly speaking, matrix multiplication is non-commutative, we Cannot simply invert this as M’ + M * MT’. However, if M is not too far from an identity matrix and T is not far from D65 then: M’ = M * MT, where MT->MT’ and yields an approximate M’. UVL VISIBLE T RGB = x RGB [ds 1 PANE fy RGB Calibration matrix M converts camera’s RGB output illuminated M x M 5 at a colour temperature T into D65 CIE XYZ A colour temperature adjustment input image into the calibration matrix M is D65 and not Tas in VIS image ‘D65’ D65 » 4 Figure 1-23. Schematic showing the colour correction of visible images (left) and the application of the calibration matrix M together with a colour temperature transform, MT (to compensate for the difference in colour temperature between D65 and T) for the correction of UV-induced visible luminescence images (right). | is required to compensate that D65 = XYZ Cred Version No. 1.0 29 Date : 14/10/2013
{kind=link}